+421 905 702 197
v pracovné dni 8:00 - 18:00
zemez894

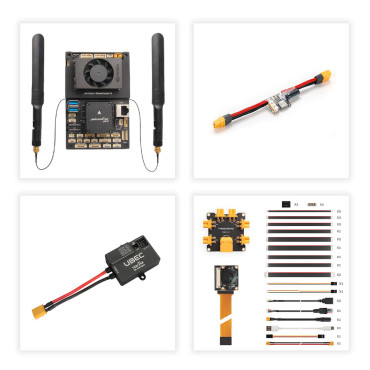
Sada základní desky Holybro Pixhawk Jetson 6X Pro Základní deska Holybro Pixhawk Jetson je založena na open-source specifikaci sběrnice Pixhawk Autopilot Bus a nosné desce NVIDIA Jetson Orin NX/Nano. Formát Pixhawk Autopilot Bus (PAB) umožňuje použití s jakýmkoli letovým kontrolérem PAB, například Pixhawk 6X. Vlastnosti: - Kombinuje výkon Pixhawk a Nvidia Jetson v jediné desce; - Propojení Jetson & Pixhawk přes UART, CAN a ethernetový přepínač; - Formát Pixhawk Autopilot Bus (PAB); - Kompatibilní s Jetson Orin NX & Orin Nano; - 2x M.2 slot: Key A/E pro WiFi/Bluetooth & Key M pro NVMe SSD. Procesory a senzory: FMU procesor: STM32H753 - 32bitový Arm® Cortex®-M7, 480 MHz, 2 MB flash, 1 MB RAM IO procesor: STM32F103 - 32bitový Arm® Cortex®-M3, 72 MHz, 64 KB SRAM Integrované senzory (aktuální verze Rev8): - Akcelerometr/gyroskop: 3× ICM-45686 (s technologií BalancedGyro™) - Barometr: ICP20100 & BMP388 - Magnetometr: BMM150 Porty základní desky a připojení: 2× gigabitový ethernetový port - Připojen k Jetson i Autopilot přes přepínač RTL8367S - Napájen z obvodu Pixhawk - 8pin JST-GH a RJ45 2× vstup pro MIPI CSI kamery (4 linky každý, 22pin FFC Raspberry Pi) 2× USB 3.0 Host (USB-A, 1,5 A) 2× USB 2.0 Host (5pin JST-GH, 1,0 A) USB 2.0 pro programování/debugování (USB-C) Key M 2242/2280 pro NVMe SSD (PCIEx4) Key E 2230 pro WiFi/Bluetooth (PCIEx2, USB, UART, I2S) Výstup Mini HDMI 4× GPIO (6pin JST-GH) CAN port (CAN2, 4pin JST-GH) SPI port (7pin JST-GH) I2C port (4pin JST-GH) I2S port (7pin JST-GH) 2× UART port (1 pro debug, 1 pro Autopilot telem2) Napájení ventilátoru IMU: IIM42652 Napájení: - XT30 konektor - Napětí: 7–21 V (3S–4S) - Oddělené napájecí okruhy pro bezpečnost letu - Lze použít Holybro UBEC 12A (3–14S) pro vyšší vstupní napětí - Vestavěný BEC desky zvládne jen 7–21 V (3S–4S), použití UBEC 12A je doporučeno jako záloha Požadavky na napájení: - Min. 8 V / 3 A (záleží na periferiích) Konektory autopilota: Rozhraní Pixhawk Autopilot Bus - 100pin a 50pin Hirose DF40 Záložní digitální vstupy napájení - Podpora I2C měření napětí - 2× 6pin Molex CLIK-Mate - Selektor napájení s ochranou proti přepětí Max. vstupní napětí: 6 V USB vstup: 4,75–5,25 V GPS a tlačítko bezpečnosti (10pin JST-GH) Druhý GPS port (6pin JST-GH) 2× CAN port (4pin JST-GH) 3× Telemetrie s flow control (2× 6pin JST-GH, 1 napojený na UART1 Jetson) 16 PWM výstupů (2× 10pin JST-GH) UART4 & I2C (6pin JST-GH) AD & IO (8pin JST-GH) USB 2.0 (USB-C, 4pin JST-GH) DSM vstup (3pin JST-ZH 1.5mm) RC vstup (PPM/SBUS, 5pin JST-GH) SPI pro externí senzory (11pin JST-GH) 2× Debug port (1× pro FMU, 1× pro IO, 10pin JST-SH) Rozměry (bez Jetson a FC): 126 × 80 × 38 mm Hmotnost: 203,2 g (s Jetson, chladičem, FC, SSD, WiFi) Specifikace UBEC-12A: Vstupní napětí: 3–14S (XT30) Výstupní napětí: 6,0 V / 7,2 V / 8,0 V / 9,2 V (doporučeno 7,2 V pro Jetson) Výstupní proud: - Trvalý: 12 A - Špičkový: 24 A Rozměry: 48 × 33,6 × 16,3 mm Hmotnost: 47,8 g Balení obsahuje: 1 × Letový kontrolér Pixhawk 6X Pro 1 × Základní deska Pixhawk Jetson Orin (s chladičem nebo bez pouzdra) 1 × Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) s chladičem a ventilátorem 1 × SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 GB 1 × Wi-Fi & Bluetooth modul: Intel 8265NGW AC Dual Band nebo Realtek RTL8B22CE 1 × Kamera: IMX219-200 1 × Napájecí modul PM02D 1 × UBEC 12A (3–14S) 1 × PDB deska 1 × Sada kabelů